登録⽇:2019/05/30
最終更新:2019/10/17
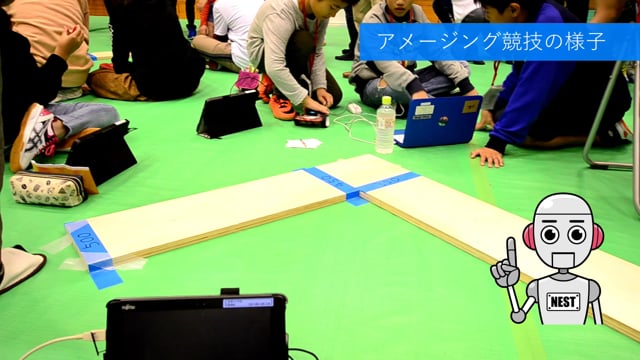
ロボットを停止させる方法と複数の動きの作り方を扱います。ロボットが停止する場面は、プログラムを終えて停止する場合と、いくつかの動作の途中である一定時間停止する場合があります。また、2種類の停止方法「ブレーキ」と「惰性運転」それぞれを実験し、どのような違いがあるかを検証します。さらに、「パワー20で回転数を3回転にしてまっすぐ前進。そのあと、パワー100で2秒間バックする」など、複数の動きにも挑戦します。これまでの学習で参加できる、ロボレーブ(RoboRAVE)という国際的なロボットコンテストのアメージング(a-MAZE-ing)という競技の説明もします。
受講対象者
受講に必要な環境・教材など
レゴ®マインドストーム®EV3
関連キーワード
モーター制御(ロボットプログラミング > EV3) 全 7 講座
トレーニングロボットを組み立てて、動かすための準備をしましょう。
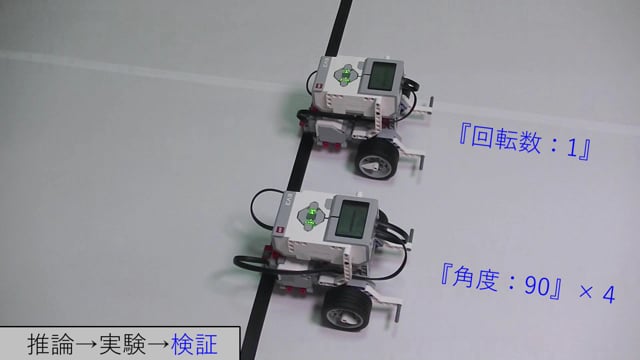
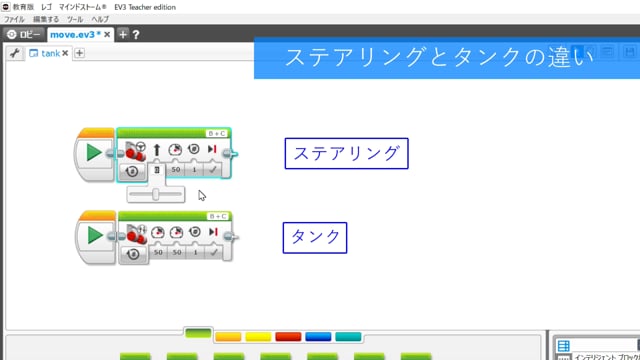
2つのモーターを同時に制御するコマンドブロックの1つ「ステアリング」を用いて、いつまで動かすか?を指示する「回転数」のモードを使ってみましょう。

コマンドブロック「ステアリング」を用いて、いつまで動かすか?を指示する「角度・秒数」のモードを使ってみましょう。
コマンドブロック「ステアリング」を用いて、走行スピードを制御する「パワー」の機能を使ってみましょう。
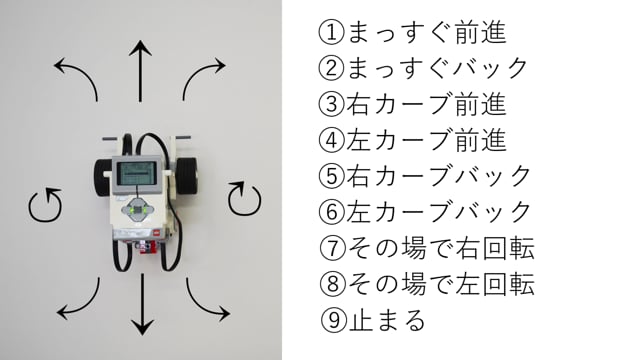
コマンドブロック「ステアリング」を用いて、ロボットに色々な動きをさせる「ステアリング」の機能を使ってみましょう。
2つのモーターを同時に制御するもう1つのコマンドブロックの「タンク」を用いて、左右のモーターを別々に制御する方法を習得しましょう。
ロボットを一時停止させる方法と複数の動きの作り方を扱います。

Copyright © Network for Education of Science and Technology All Rights Reserved.